<< Вернуться на главную
Колесный пароход
В нашем судомодельном кружке однажды решили построить модель колесного парохода. И все-бы хорошо, но оказалось, что в отличие от винтовых конструкций, нужен редуктор со слишком большим передаточным отношением.
Нашли редуктор, но оказалось, что для модели он слишком велик и тяжел. Да и трение в нем такое, что к нему еще и приличный двигатель привинтить надо. Тупик получился. Или модель увеличивать нужно, или где-то искать подходящий редуктор.
Вот тут и возникло интересное техническое решение. Вместо обычного двигателя, применить шаговый. А скорость вращения задать через схему управления на микроконтроллере. Получилось, что в этом случае контроллер и шаговый двигатель окажутся значительно легче и меньше чем двигатель с редуктором.
Задачка показалась нам интересной. Тут и в программировании микроконтроллеров можно от души потренироваться, и в паянии и в конструировании. Ну и поренировались........
Микроконтроллер взяли 16F628-й а в качестве коммутирующих элементов, взяли мощные полевые транзистроы IRFZ. То что получилось можно глянуть здесь
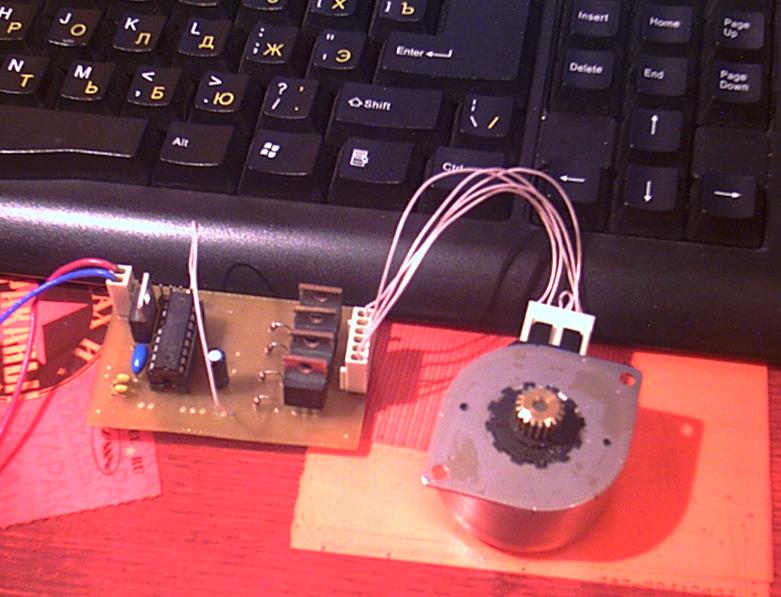
Теперь настала очередь программного обеспечения. Под рукой не оказалось 628-го контроллера, пришлось взять испытанный 84-й :-).
из-за того, что это контроллер попроще, и в нем нет подтягивающих резисторов, пришлось на входы дополнительно напаять сопротивлений (на фото их не видно, потому что они с обратной стороны платы). Сначала написали программу, которая формирует 4-ре скорости вращения. 2-е вперед и 2-е назад. Как работает, можно глянуть небольшой видеоролик. Для того, чтобы было видно как вращается ось двигателя, на нее нацепили прищепку :-).
Ролик
Второй вариант предназначался для работы с пропорциональным радиоуправлением. В нем скорость вращения двигателя регулировалась в зависимости от длительности импульсов с приемника.
В конечном итоге по финансовым причинам остановились на варианте прямого управления. Однако при необходимости можно установить и вариант радиоуправления. Для этого понадобится только перешить микроконтроллер.
Вобщем все поставленные цели были выполнены, теперь дело за судомоделистами :-)