<< Вернуться на главную
Робот1
Для отработки алгоритмов управления различными техническими устройствами, нам очень нужен был какой-нибудь объект и желательно поинтересней. Вот мы и приняли решение разработать учебного робота. Роботы такого типа в некоторых странах выпускаются серийно (например американский робот HERO-1, продано несколько тысяч экземпляров)
Нам хотелось создать робота, который будет изготовлен исключительно из доступных материалов. Это нам удалось, в нашем роботе нет ни одной дефицитной детали!
Внешний вид робота можно поcмотреть здесь ->>

На прямоугольном каркасе, изготовленном из аллюминиевого уголка закреплена шестиугольная, вращающаяся "голова", в которой расположены датчики, и "рука", которая может выдвигаться.
Голова вращается на специальном, шарикоподшипниковом узле, изготовленном из "диска здоровья"
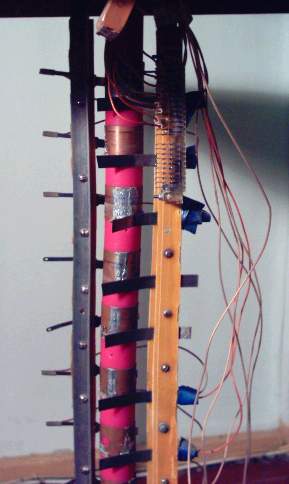
Питание (127в) подается через токоведущую штангу, расположенную на верху "головы". Штанга сделана из пластмассовой гимнастической палки. Верхняя часть головы (вместе с токоведущей штангой) снимается. Для удобства она соеденена с роботом при помощи разьема. Для свободного перемещения робота, кабель питания изготовлен из витого телефонного кабеля, закрепленного сверху. В результате робот может свободно перемещаться по всему классу. При перемещении кабель провисает но не мешает движению.
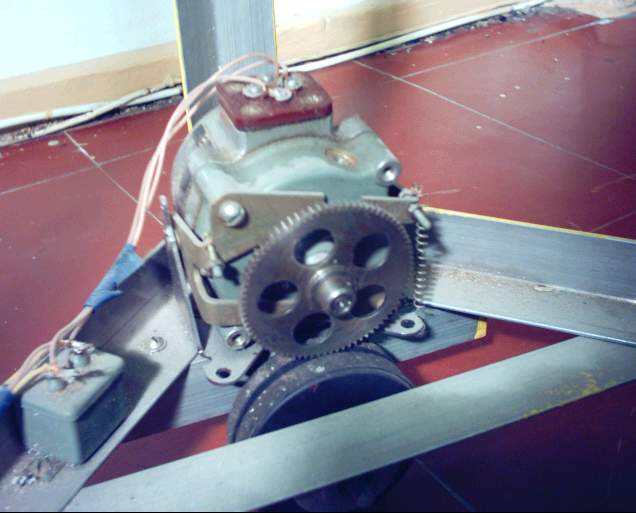
"Ноги" робота изготовлены из хоккейных шайб, которые вращаются на шарикоподшипниках. Двигатели ног, вместе с редукторами, расположены на подпружиненной платформе. и передают вращение при помощи шестеренок. Кроме двух активных ног, из мебельных роликов изготовлены две подпружиненные, поддерживающие ноги.
Механизм ног
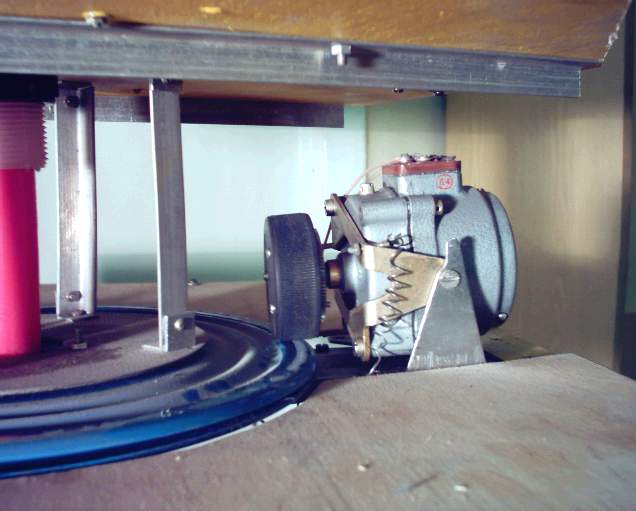
Такая-же платформа но с фрикционом (сделанном из хоккейной шайбы), вращает голову.
Для передачи питания и сигналов управления с головы (вращающейся) на неподвижный корпус, по центру робота идет токосъемник, тоже изготовленный из гимнастической палки.
Если снять верхнюю часть "головы", то видно основание головы, на котором расположены датчики, "рука" с двигателем, элементы крепления и контактная колодка управления.

"Рука", изготовлена из механизма от печатной машинки. Фактически это линейный шарикоподшипник. Движение руки обеспечивает зубчатая рейка.

"Разбор полета"
В результате имеем готового робота, богатый опыт конструирования и изготовления. Это конечно плюс, но увы основная цель не была достигнута.
Нас подвела "гигантомания". Конечно нас можно понять, хотелось сделать что-то большое, и красивое :-). А в результате робот очень неудобен для проведения лабораторных работ. Большой размер потребовал мощное питание, а систему управления не удалось реализовать через тот-же кабель(как изначально планировалось). Предполагалось, что робот будет управляться прямо через кабель питания с использованием высокочастотной модуляции команд управления (питание имеет частоту 50 герц, что позволяет легко разделить сигналы). Но увы, этот замысел не удался.
В результате за роботом волочится многожильный кабель управления и плюс сверху витой кабель питания. С таким "багажем" особо не разбежишься. Да и таскать его на занятия со склада и обратно(вместе с блоком питания, блоком управления и кабелями), удовольствие ниже среднего.
В настоящее время данный проект закрыт. Лабораторные проводим с роботом "второго поколения". Он намного удобней (хотя и не так масштабен :-) )