<< Вернуться на главную
Робот3
В настоящее время идет работа над созданием робота номер 3. Собственно робот уже есть и даже работает. Но из-за некоторых конструктивных особенностей, этот проект еще долго не будет закрыт :-).
Робот представляет собой своеобразный конструктор, который позволяет легко менять его конфигурацию, и ставить различные эксперименты.
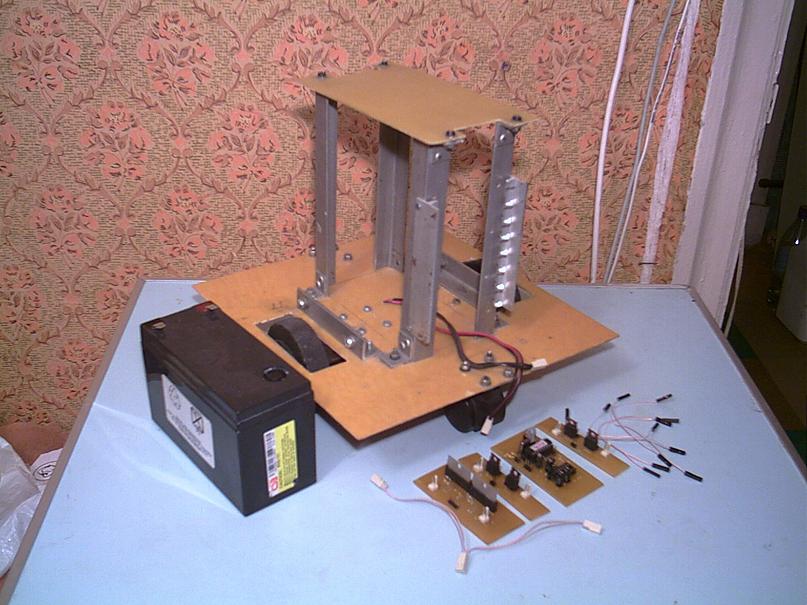
На универсальной платформе располагается каркас для печатных плат, аккумуляторная батарея и ходовые двигатели с редукторами и колесами. Каркас легко позволяет менять платы (они просто вставляются в специальные пазы каркаса).
К роботу изготовлено несколько печатных плат различного назначения. На платах установлены контактные "гребенки", которые при помощи переходных проводов позволяют собирать схемы.
В настоящее время имеем несколько плат формирователей, плату с микроконтроллерными "мозгами", платы с инфракрасными преобразователями для дистанционного управления. На "подходе" платы радиоуправления, платы с датчиками и различные исполнительные механизмы (например "голова" вращающаяся по двум осям).
А собственно зачем нам робот нужен? Для того, чтобы различные эксперименты ставить! Ну вот и ставим! Сейчас проводим эксперименты по созданию многоканального дистанционного управления, телеметрии и систем автоматического наведения. А когда эксперименты завершим, и все это станет обычными лабораторными работами, начнем совсем другие эксперименты. Есть например идеи современную, оптическую, мышку распотрошить, выдрать из нее матрицу и подключить ее ввиде глаза. Да если еще все это на вращающуюся голову закрепить.... ЭЭХ!
Ну а теперь можно глянуть как все это выглядит.
Это общий вид в сборе (на сегодня)

А это общий вид "В РАЗБОРЕ"
Ходовая часть

"Мозги" и силовые формирователи разного назначения
