<< Вернуться на главную
Шагающий робот
Описание проекта
Ну вот! не успели сделать проект "планета роботов" для отработки "муравьиных" технологий (управления многими роботами одновременно). Как на очереди и вторая идея.
Дело в том, что управление сделаннымии нами роботами, не представляет особых трудностей. Две "ноги" и два глаза, это не тот полигон, на котором можно написать что-то серьезное. "муравьиные" технологии, это полигон для отработки параллельных процессов и их синхронизации. Но роботы там достаточно примитивные.
Давненько хотелось что-то шагающее изобразить. Но увы, наши модельные кружки отказались нам в этом помочь. Ну раз сделать такого робота "в железе" достаточно сложно, то уж его математическую модель собрать нам никто не помешает. Кстати робота этого типа можно тоже на планету роботов "закинуть". А еще соревнования по бегу между шагающими роботами устроить (например в рамках ежегодного конкурса).
Итак приступаем к проектированию.....
Я так понимаю, что можно предлагать различные, самые экзотические конструкции. Мало того, нас никто не сдерживает. Можно разрабатывать, моделировать и забрасывать на планету роботов все новые и новые конструкции.
А вот вам и первая...
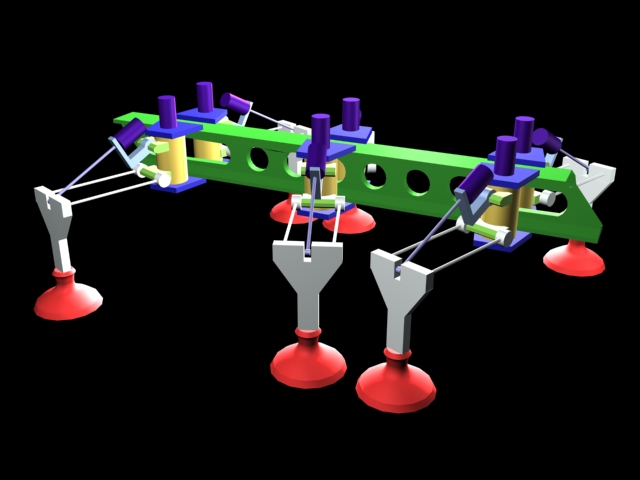
Шестиногая схема выбрана из следующих соображений:
Если три ноги стоят на земле (минимальное количество точек для устойчивого
положения), то три других ноги можно оторвать от земли и перенести вперед. Таким
образом подобная конструкция позволяет обеспечить устойчивое положение робота при
ходьбе и при этом не заботиться о равновесии. Меньшее количество ног потребует
построения вестибулярного аппарата, а большее создаст трудности в управлении и
синхронизации.
Принцип движения прост. Три ноги (в шахматном порядке) отрываются от земли и переносятся вперед. Одновременно три других ноги, оставаясь на земле, перемещают туловище робота вперед за счет поворота относительно корпуса.
Если у вас утановлен COSMOPLAYER, то вы можете все посмотреть в движении.
Ну а если эта технология вам чужда, а посмотреть анимацию очень хочется. То качайте
авишку. Но она в три раза больше и не позволяет посмотреть со всех сторон.
Шестиногий вариант (1560кБ))
Кстати а как назвать этого робота? Если у вас есть предложения, поделитесь по почте. Не называть же его "шестиногим безруком" :-)
Продолжение следует.....