<< Вернуться на главную
Планета роботов
Описание проекта
"Планета ШЕЛЕСЯКА, полезных ископаемых нет, воды нет, населена роботами". Узнали? А возможно именно такая планета появится скоро на нашем сайте. Это будет очень странная планета. Она будет совершанно плоская и на ее поверхности будут валяться кубики, блоки роботов и готовые роботы.
С помощю специальных программ можно будет перехватить управление любым роботом (или даже группой роботов).
Можно будет собирать из блоков новых роботов, с нужными характеристиками. А можно строить из кубиков различные здания и сооружения.
конструкция роботов
Роботы строятся по модульному принципу. Каждый робот представляет собой стопку
квадратных модулей поставленных друг на друга. На сегодня предполагается
разработка следующих типов модулей:
1) Ходовой модуль (две гусеницы,аккумулятор,система управления и навигвции).
Может быть установлен только внизу
2) Дополнительный аккумулятор(увеличивает автономность)
3) Солнечная батарея (устанавливается только сверху)
4) блок манипуляторов
5) локатор кругового обзора
6) телекамера(возможность получения картинки)
7) бортовая вычислительная машина(возможность задать автономную программу)
8) радиоприемник (для связи с другими роботами)
Каздый робот может состоять не более чем из 5-ти блоков, однако никто на запрещает собрать хоть целую армию роботов с различными конфигурациями. Главное - обеспечить правильное и синхронное управление.
Уравление роботом
Для управления роботами будет использоваться специальная DLL, используя которую можно будет управлять любыми роботами, находящимися на поверхности.
Если робот имеет бортовую вычислительную машину, то в нее можно записывать программы автоматического управления, основанные на анализе текущей обстановки.
Текущее состояние робота можно будет оценивать по кадрам телеметрической информации.
Отображение результатов
Текущая карта поверхности планеты "ШЕЛЕСЯКА" будет расположена на сайте. Можно будет посмотреть распложение всех роботов и сооружений на поверхности. Правда масштаб будет мелкий, и каждый робот и кубик будет размером с пиксел. Однако если есть идеи - предлагайте. Рассмотрим. Например можно построить вид из телекамеры любого робота на поверхности
Цель проекта
Главная цель проекта - создание модели среды для отработки алгоритмов управления сложными стистемами (муравьиная технология).
Срок запуска проекта 1 сентября 2004г
Описание блоков
1) Основной (ходовой) блок
Этот блок является основой любого подвижного робота. Фактически простейший робот может состоять только из одного этого блока.
На блоке установлены две гусеницы для передвижения, источник питания, система радиоуправления, 4-ре датчика касания, датчик координат на поверхности планеты(X,Y) и компас.
Такого набора датчиков и двигателей достаточно, для того чтобы реализовать алгоритмы перемещений по поверхности.
Естественно, что этот блок является самым нижним, и является носителем для остальных блоков.
Внешний вид основного (ходового) блока робота{kind=link}
Трехмерный вид основного блока (технология VRML)
2) Блок локаторов кругового обзора
Плоский блок, который содержит 4-ре локатора, постоянно вращающихся вокруг оси. Робот, у которого имеется такой блок, постоянно сканирует пространство вокруг себя и дальность до обьектов на каждом азимуте записывается в массив.
Блок локаторов кругового обзора позволяет построить программу управления на основе анализа данных о дальности объектов.
Внешний вид блока локаторов кругового обзора
{kind=link}
Трехмерный вид блока локаторов (технология VRML)
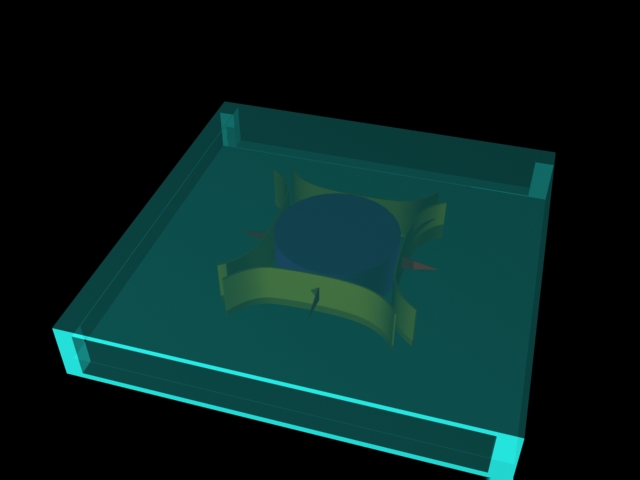
3) Блок манипуляторов
На поверхности планеты разбросаны разноцветные кубики. Вот для работы с этими кубиками и предназначен блок манипуляторов. На каждой грани кубиков имеются 4-ре дырки, в которые могут входить "пальцы" манипулятора.
Таким образом робот, у которого имеется манипулятор, может переносить кубики и ставить их друг на друга (только в два этажа). Если необходимо построить многоэтажную конструкцию, то прийдется подумать :-)
К плоской платформе блока прикреплена подвижная рама, по которой в свою очередь перемещается тележка с "пальцами".
Внешний вид блока манипуляторов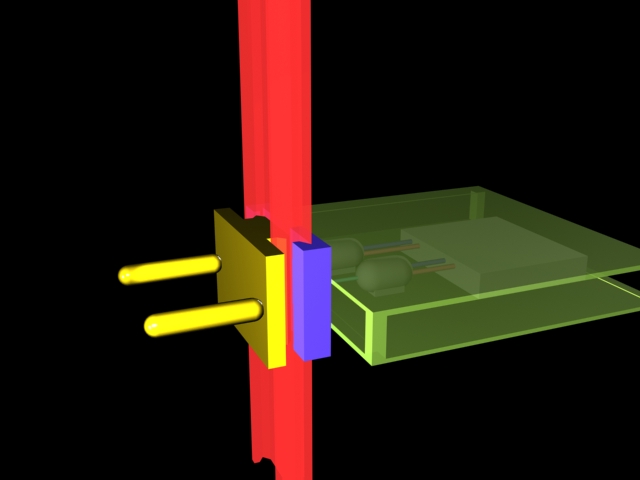{kind=link}
Анимация блока манипуляторов(1.8мБ)
Трехмерный вид блока манипуляторов (технология VRML)
4) Робот в сборе
Для того, чтобы можно было представить что получается, показываем робота в сборе.
Робот в сборе(картинка)
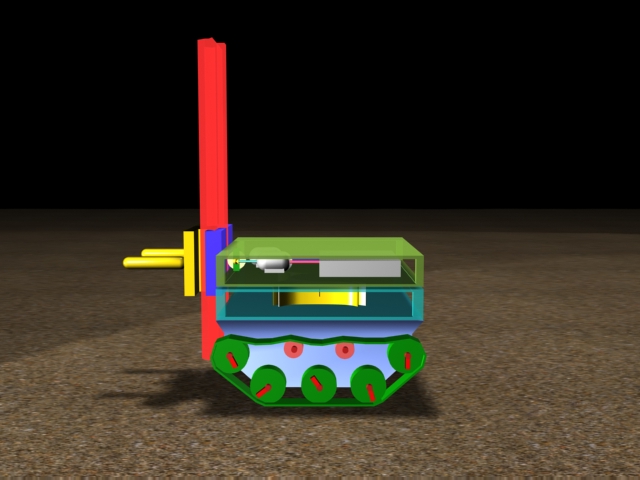{kind=link}
Робот в сборе(видео низкое качество 1.2мб)
Робот в сборе(видео высокое качество 4мб)
А здесь можно посмотреть сверху на поверхность планеты. Белыми точками показаны роботы, цветными - кубики. Поверхность формируется сервером и выкладывается на сайт по ФТП. Пока идет отладка, поэтому рисунок на поверхности меняется очень редко(только когда работает сервер)
Продолжение следует.....